|
Sarafun Behavior Trees package
1
Behavior trees for the SARAFun project
|
|
Sarafun Behavior Trees package
1
Behavior trees for the SARAFun project
|
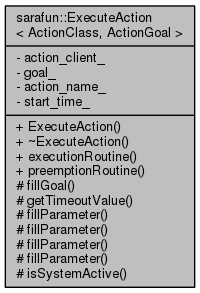
#include <ExecuteAction.h>
Public Member Functions | |
| ExecuteAction (std::string node_name, std::string actionlib_name, std::string bt_name) | |
| virtual | ~ExecuteAction () |
| int | executionRoutine () |
| void | preemptionRoutine () |
Protected Member Functions | |
| virtual bool | fillGoal (ActionGoal &goal)=0 |
| virtual double | getTimeoutValue ()=0 |
| bool | fillParameter (std::string param_name, std::string ¶m_val) |
| void | fillParameter (std::string param_name, std::string def, std::string ¶m_val) |
| void | fillParameter (std::string param_name, double def, double ¶m_val) |
| void | fillParameter (std::string param_name, int def, int ¶m_val) |
| bool | isSystemActive () |
Private Attributes | |
| actionlib::SimpleActionClient < ActionClass > * | action_client_ |
| ActionGoal | goal_ |
| std::string | action_name_ |
| ros::Time | start_time_ |
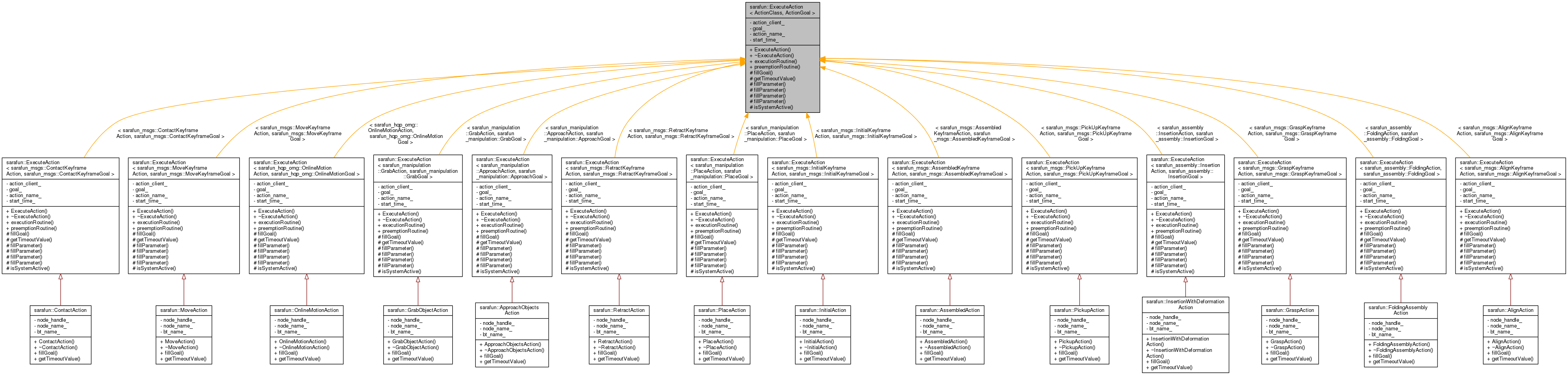
This class implements an interface for BT actions destined to call a generic rosaction server.
It establishes a bridge between the behavior tree action class and an externally implemented action: BT <–> ExecuteAction <–> external implementation
Definition at line 17 of file ExecuteAction.h.
 1.8.6
1.8.6

