|
Sarafun Behavior Trees package
1
Behavior trees for the SARAFun project
|
|
Sarafun Behavior Trees package
1
Behavior trees for the SARAFun project
|
#include <ContactAction.h>
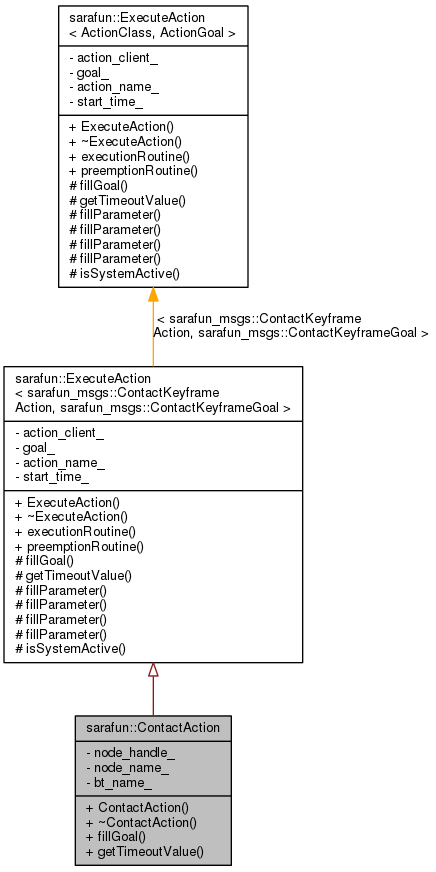
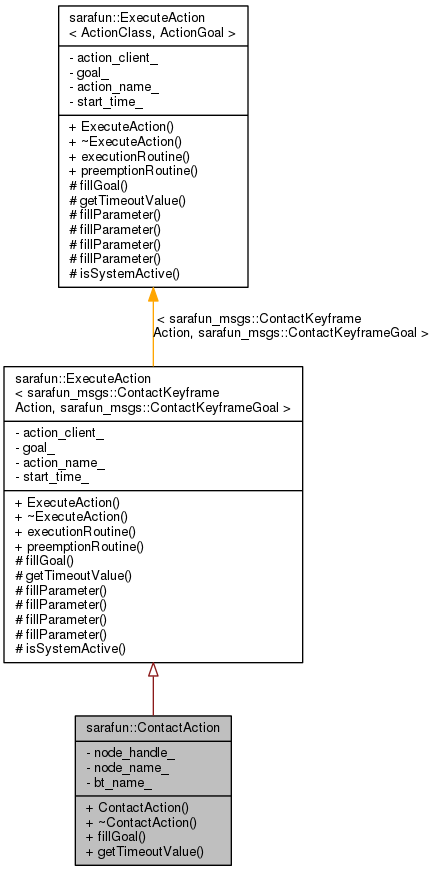
Public Member Functions | |
| ContactAction (std::string node_name, std::string action_name, std::string bt_name) | |
| ~ContactAction () | |
| bool | fillGoal (sarafun_msgs::ContactKeyframeGoal &goal) |
| double | getTimeoutValue () |
Private Attributes | |
| ros::NodeHandle | node_handle_ |
| std::string | node_name_ |
| std::string | bt_name_ |
Additional Inherited Members | |
 Private Member Functions inherited from sarafun::ExecuteAction< sarafun_msgs::ContactKeyframeAction, sarafun_msgs::ContactKeyframeGoal > Private Member Functions inherited from sarafun::ExecuteAction< sarafun_msgs::ContactKeyframeAction, sarafun_msgs::ContactKeyframeGoal > | |
| ExecuteAction (std::string node_name, std::string actionlib_name, std::string bt_name) | |
| virtual | ~ExecuteAction () |
| int | executionRoutine () |
| void | preemptionRoutine () |
| bool | fillParameter (std::string param_name, std::string ¶m_val) |
| void | fillParameter (std::string param_name, std::string def, std::string ¶m_val) |
| void | fillParameter (std::string param_name, double def, double ¶m_val) |
| void | fillParameter (std::string param_name, int def, int ¶m_val) |
| bool | isSystemActive () |
Definition at line 9 of file ContactAction.h.
 1.8.6
1.8.6

